《deformation transfer for triangle meshes》回顾
之前garment transfer的project中有使用到deformation gradient作为deformation representation,deformation gradient这个概念出自Sumner于04年在TOG上发表的一篇paper “Deformation Transfer for Triangle Meshes”,现进行回顾。
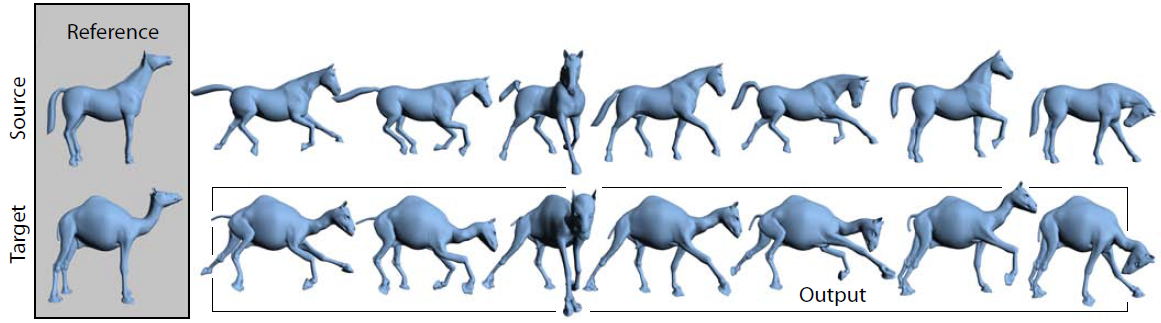
这个work的idea在于可以将某个mesh的deformation迁移至其它的mesh上,如下图,马的动作可以被迁移至骆驼上。
-
第一行:左侧为canonical space的source reference(记为source),右侧为不同pose下的deformed source。
-
第二行:左侧为cononical space的target reference(记为target),右侧为根据Source的deformation得到的deformed target,可以看出deformed target与deformed source的pose一致。
那么问题来了,怎么实现这样的transfer呢?这里先给出paper的pipeline:
Step1: 找一个transformation matrix,用于表示由source至deformed source的deformation,记为deformation gradient;
Step2: 建立一个source与target之间的mapping,以明确apply deformation时的correspondence;
Step3: 通过mapping建立的correspondence,将deformation gradient作用于canonical space的target;
Step4: 此时会发现deformed target会裂开,添加共点约束,确保shared vertices会transform至相同位置。
1 deformation gradient
deformation gradient用于描述两个相同拓扑mesh之间的线性变换,其encoding的内容为triangle的orientation、scale、rotation。由于仅根据三角形顶点坐标无法判断变形后face的方向是否正确,Sumner提出了引入第四个顶点,为deformation gradient添加方向信息:
\[v_{4} = v_{1} + (v_{2} - v_{1}) / \sqrt{|v_{2} - v_{1}| \times v_{3} - v_{1}}\]这里为什么要scale一下,是为了保证与edge的长度成比例。则transformation可定义为:
\[Qv_{i} + d = \tilde{v}_{i}, i \in 1...4\]将\(v_{1},...,v_{4}\) 代入上式,可消除d,得到\(QV = \tilde{V}\),其中:
\[V = [v_{2} - v_{1}, v_{3} - v_{1}, v_{4} - v_{1}]\] \[\tilde{V} = [\tilde{v}_{2} - \tilde{v}_{1}, \tilde{v}_{3} - \tilde{v}_{1}, \tilde{v}_{4} - \tilde{v}_{1}]\]则deformation gradient(Q)可表示为:
\[Q = \tilde{V}V^{-1}\]2 Mapping
至此我们已经有了Q,并可以通过Q将source变形至deformed source,但是还有一个问题是如何将Q作用于target?这时便需要对source和target的triangle进行mapping,以确定source某triangle的deformation gradient对应至target的哪个triangle。
这个mapping是user specified,可以自行设定(如手动指定、找最近点等)。
3 Consistency Constraint
现在有了mapping的correspondence,我们可以找到source中每个triangle的deformation gradient对应至target的具体位置,并对target进行变形,但是如果直接这样做会出现下图的情况:
-
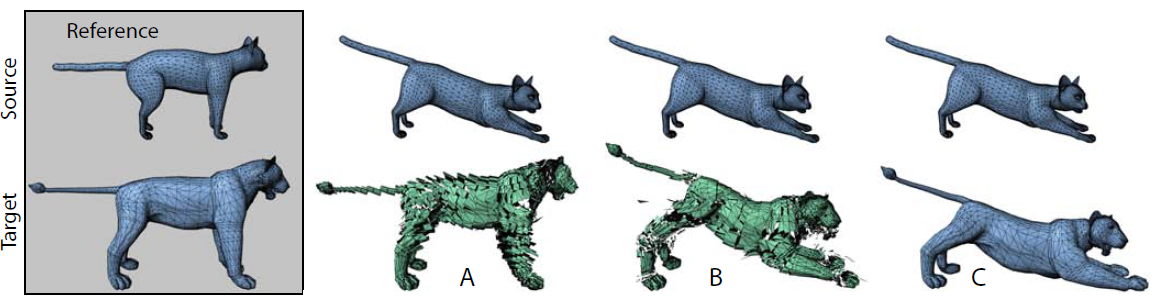
A: 将source->deformed source的deformation gradient作用于target,可以看出target裂开了,而且pose并没有变,只是triangle的orientation、scale、rotation发生了变化。这是因为deformation gradient并没有对translation进行encoding,故deformed target不包含translation。
-
B: 既然A中的target没有translation,直接的想法是将source->deformed source的translation作用于target->deformed target,这样deformed target的pose变过来了,但是triangle是相互分裂的。原因很好理解:deformation gradient是作用于triangle的,对于vertices并没有添加约束,导致本该shared的vertices分开了。
-
C: 原文在B的基础上添加了共点约束,使得deformed target的mesh是连续的。
接下来讲一下是怎么添加这个共点约束的。既然deformed target裂开了,那么我们就限制一下这个transformation,使得变换前后shared vertices都必须共点,根据上述描述,可以写出约束方程:
\[T_{j}v_{i} + d_{j} = T_{k}v_{i} + d_{k}, \quad \forall i, \forall j,k \in p(v_{i})\]其中,\(p(v_i)\)表示顶点i的一阶邻域中的顶点。这个式子怎么理解呢?看一下下面这张图就能明白:
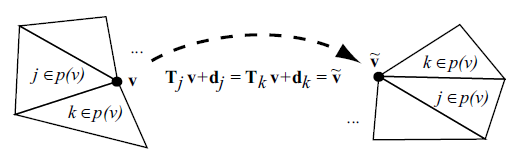
既然我们要求triangle在进行transformation前后vertex是shared,那么对于这个vertex周围的所有triangle,它们的affine transformation对于顶点i的变换结果应该是相同的。
那么共点约束的目标方程可改写为:
\[\underset{T_{1} + d_{1}, ..., T_{|T|} + d_{|T|}}{min} \sum_{j=1}^{|M|} || S_{S_{j}} - T_{t_{j}} {||}_{F}^{2} \\ s.t. \quad T_{j}v_{i} + d_{j} = T_{k}v_{i} + d_{k}, \quad \forall i, \forall j,k \in p(v_{i})\]这样便可求解出\(T\)了。paper中还对这个解法进行了进一步优化,可以直接求解出deformed vertices,这里不再展开了。